

時間経過に伴い魚探画面に映し出されるデータは変わっていきます
釣りにおける魚群探知機の使い方は、振動子よりソナー(パルス波)を発射させて、水中・水底の情報を探ることとなります。
探査可能な範囲は、基本的には、振動子の指向角度(ソナーが到達する距離・範囲)と出力によって決まります。
探査範囲と画面表示との関係
ボートで海釣りを行う場合の魚探の探査範囲と画面表示との関係を、ごく簡単な絵図で表してみました。
ボートの進行方向の前方に、タコやタイが泳いでいるケースです。
(№1 )左方向へボートを走行させ、魚探を稼動させています。
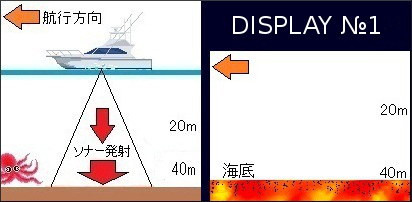
海底にはタコがいます。
しかし、魚探の画面には、タコの気配はいっさい現れていません。
理由は、タコは、振動子から発射されたソナーパルス波の、探知範囲外にいるからです。
*円錐状の広がる幅~指向角度~は、振動子仕様によって異なります。
(№2) 探知範囲内にタコが入りました。
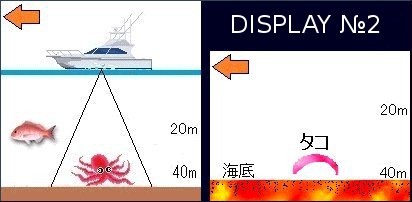
魚探画面には、タコの存在が確認出来ます。
また、ボート前方にはタイが泳いでいます。
但し、タイは感知範囲外の位置にいるので、魚探画面には表示されません。
*現段階においてアングラーは、タイの存在を知りません。
(№3) 探知範囲内にタイが入りました。
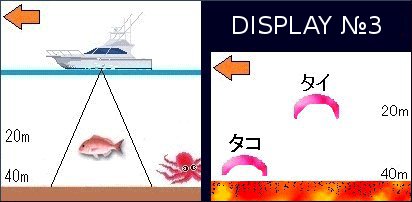
画面にタイの存在が、新しい情報として表示されます。
またタコの位置は、既に探知範囲外ですが、数十秒前の「過去の情報」として、今はまだディスプレイに表示されています。
*プレイバック機能・記憶機能を搭載した魚群探知機は、後ほど「過去の魚探画面」の再確認が可能です。
画面データの捉え方
上記の絵図(No.1~3)は、ボートを前方に移動中に、まず最初にタコを、そして次にタイを測定したケースです。
(註:便宜的に魚種を特定していますが、実際には、魚探で魚種の判別は出来ません。)
魚群探知機は、ソナー(超音波)の探査範囲内においてのみ、対象物を感知測定します。
フィッシングポイントを見つけ出して仕掛けていく、アグレッシヴな釣りにおいて、ボートを移動させながら探る、といった使い方が基本となるのはそのためです。
画面の時間軸は、右に行くほど「現在」であり、左へ行くほど「過去」になります。
画面の右側には、時間経過に従い、新しい水中情報が次々とアップされていきます。
そして「過去の情報」は、次々と画面の左側へと流れ、画面上から消えていきます。
上記絵図No.3には、タイとタコの魚影が同時に表示されていますが、両者を比較すると、タイ魚影は「新しい情報」、タコ魚影は「古い情報」といった見方となります。
タコ&タイの魚影が、「へ」の字のように表示されています。
その形状から、ブーメラン反応とも呼ばれる現象です。
単体の魚(大きなサイズの魚や、泳ぐ速度がゆっくりな魚)を捉えると、への字状の反応になるケースがあります。
「超音波の魚への到達距離(時間)」が、時間経過によって刻々と変わっていく事がから起こる現象だと考えられます。
魚探画面の情報は次々と「過去の情報」となります
ボート・フィッシングにおける魚群探知機の使い方にあたり、 ソナーを真下に向けて発射する「縦方向への探り」ならば、 常にボートを中心点とした、船体の真下の水中データを、次々と収集・測定する事になります。
そして画面の情報は、表示された瞬間から、たちまち過去の情報となります。
画面の画像は、ボートの移動中・停止中にかかわらず、厳密には、水中の「リアルタイム情報」を示しているものではありません。
ですので、仮にディスプレイ上で魚群を見つけたからといって、即座に仕掛ければ、 ターゲットの魚にダイレクトにアタック出来る・・・・とは限りません。
ディスプレイに映った魚の群れを狙うのならば、その魚群のポイント位置や、ポイントと船との距離を考慮して行うこととなります。
たとえばそれは、ポイントまで引き返す(バックする)事になる訳ですが、もしもポイントまで、とても遠く離れていたとしても、GPS機能を搭載している魚群探知機ならば、そういった作業も、比較的スムーズにはかどります。