

基本的な原理(やまびこと似ています)
海や湖沼あるいは川などの水中に向けて音波を発射し、対象物に反射されて戻ってくるまでの、往復の送受信時間や周波数信号の強弱や変化によって、水深、水底の地形、魚の群れの状況といった情報を測定・分析するのが、魚群探知機(魚探)の基本的な仕組みです。
この音波は、人間の耳には聞こえない、高い周波数(振動数)である事から、超音波(ultrasonic)と言います。
また、魚探の分野では、ソナーと呼ばれる事が多くあります。(SONAR:sound navigation and ranging)

漁船に設置されたレーダーと魚探
魚群探知機の原理は、【対象物にぶつかり、反射して戻ってくる】 ソナーの特性を活用したものです。
「対象物」とは、魚だけではなく、水底の砂地・岩盤、海藻類、塵芥類など、様々なものが考えられます。
この原理、イメージしやすく表現するとすれば・・・
山などで「ヤッホー」と叫べば、少し時間差の後、遅れて「ヤッホー」と返ってくる、やまびこの原理と基本的には同じと言えるでしょう。
構成部位と仕組み
- 魚群探知機を構成する主要部位
-
本体(検知器)
モニター(ディスプレイ)
振動子(送受波器/トランスデューサー/センサー)
電源器(バッテリー、電池)
本体と振動子は、ケーブルで繋がっています。少数ですが、ワイヤレス仕様のモデルもあります。
小型機の場合、モニターは、本体と一体化しています。
電源は、外部バッテリーをケーブルで接続して使用するのが一般的。また、一部の機器やポケット魚探(ポータブル・携帯型)には、乾電池が使用されています。
- 仕組み・流れ
-
- 振動子から水中へ超音波を発射。
- 対象物に衝突して跳ね返ってきた反射波を振動子で受信。
- 受信データを本体へ送信。
- 本体内で解析を行った結果を、ディスプレイに画像・数字・グラフ等で表示。また、アラーム音で知らせます。
測定の事例
- ソナー(超音波)の秒速
-
水中では約1,500mです。
(ちなみに空気中では約340m)
- 測定事例
-
魚群探知機の測定につき、簡単な例をご紹介します。
ソナーを2回(A・B)、海中真下へ発射。
それぞれの、対象物に反射して戻ってくるまでの往復時間を計測します。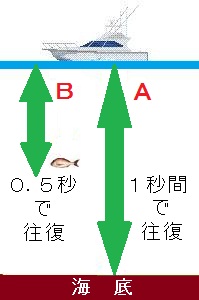
A(往復で1秒間)
ソナー発射後、0.5秒で海底に到達し0.5秒間で返ってきた、 すなわち、海底までの水深は750mである、と測定出来ます。
(秒速1,500m×1.0秒)÷ 2(往復)=750m
B(往復で0.5秒間)
発射後、0.5秒で返ってきた信号を受信したならば、 水深375mに異物(魚の群れなど)が存在する、と測定出来ます。
(秒速1,500m×0.5秒)÷ 2(往復)=375m
備考:実際にソナーを水底に向けて発射した場合、円錐状に伸びていきます。円錐の角度(指向性)は、出力・振動子の性能等の条件により異なります。
分析・判定の機能
ディスプレイに表示された画像の状態(形状、色彩)から、水中や水底の状況を分析します。
現在では、3D技術の進化により、より詳細な分析・判定が可能です。
ところで、一般的な魚群探知機は、魚の群れの大小や密度、おおよそのサイズ等の測定は可能です。
しかしながら、タイやヒラメといった、具体的な魚種を識別する能力はありません。
そういった意味では、複雑な超音波を頭部から発射して、魚の具体的な種類を識別可能だとされているイルカたちのほうが、一枚上手なのかもしれませんね(笑)。
(備考)
機種により性能・機能は異なります。
また、1966年にホンデックスが魚種判別魚探の特許を取得しているとのことです。
ナビや航跡・地図作成
GPSやプロッターの機能を搭載した製品は、マップ上における自船位置や航路の測定確認、航路の描画表示、目的地までのナビゲーション、そして航跡や任意ポイントのデータ記憶・登録、及びプリントアウトなどが行えます。
これらの仕様・機能を装備したものは、GPS(プロッター)魚群探知機と呼ばれています。