

まずは、デフォルト&フルオート設定が便利です
魚群探知機の魚探機能は、自分好みの設定にしたり、マニュアル操作を行うことが可能です。
しかしながら、ビギナーの方は、慣れていないので面倒でしょうし、よく分からないこともあるのではないかと思います。
なんのために魚探を使うのか、それは、より多くの魚を釣り上げる事に他なりません。
もしも操作が面倒に感じるのならば、そんなことに時間を取られるより、「機器にお任せ」で、その分、操船や釣りに集中するのが賢明です。
(画像)HONDEXの操作キーです。分かりやすい日本語表記となっています。
取扱説明書を見ながら一通り触って基本機能を確認した後は、デフォルト設定&フルオート操作で問題はありません。
最近の魚探機器は、性能・ユーザビリティが向上しているので、初期設定のままで使っても、まずは不足を感じることはないかと考えます。
画面・マーク等を好みのカラーを設定する以外は、とりあえずフルオートで体験してみましょう。
もちろん、使っているうちに、だんだんと機器の扱いに慣れて余裕が出てきたら、色々といじってカスタマイズしたり、自分なりの使い方を考えてみるのも楽しいでしょう。
- 使い方のポイント
-
本ページでは、魚探機能に関する初歩的な使い方のポイントを幾つかご紹介します。ご参考になれば幸いです。
表示ルールに慣れる
左に動いて消えていく画像は「過去データ」であり、画面の右端が「最新データ」となります。
魚探で見えるものは、未来の画像ではなく、今その時のボートの真下の状況です。
そして画像は、右から左へと動いて消えていきます。
これが魚探の肝となる部分です。まずはこの表示ルールに慣れるようにしましょう。※
※註
ソナー(超音波)をボート直下へ向けて発射する機種の場合。大多数の魚探がこのルールに該当します。但し一部の機種は、船前方へ向けて発射出来るものがあります。その場合は、この表示ルールに該当しません。
参照:探知範囲と画面表示
魚群や釣れそうなポイントを見つけたらマーキングする
たとえば航行中に、次のようなケースに遭遇したとします。
- 海底に磯場があり、そこに魚群が発生していることを魚探画面で確認したとします。
- いかにも釣れそうな雰囲気のポイントです。
- しかしボート走行中の場合、ポイントから遠ざかっていきます。
- 魚探画面からも消えていきます。
このようなケースの場合、GPS機能を使ってGPS画面(海図)に、マークを入力します。
魚が居ついていそうな磯場を見つけたら、これは貴重な「お宝」です。しっかりとマークしておきましょう。
なるだけ早く(出来れば魚探画面に表示された瞬間に)入力するのが望ましいです。というのも、いったん通り過ぎてしまうと、再び全く同じ場所に戻るのは容易ではないからです。
ちなみに素早く戻りたい場合、ウイリアムソンターンという反転操舵術が活用出来るかもしれません。覚えておくと良いかと思います。
おさかなマーク機能を活用する
魚探画面で魚は、数色のグラデーションで表示されます。
超音波の反応が強い場合や、魚のサイズが大きかったり、複数の魚(まさしく魚群)だったりすると、よりはっきりと表示されます。ただし、もやもやっとした形状なので、まったく魚らしさはありません。
そこで重宝するのが、おさかなマーク(フィッシュマーク)。今では多くの魚群探知機に装備されている機能です。
この機能を使うと、従来の「ぼやっとした描画」が、魚のイラストで表示されるので、視覚的なリアリティーを感じられます。
また、おおよその魚のサイズを計測表示してくれるので、そういった点でも便利な機能です。
フィッシュマークの画像例。数字はサイズを示しています。
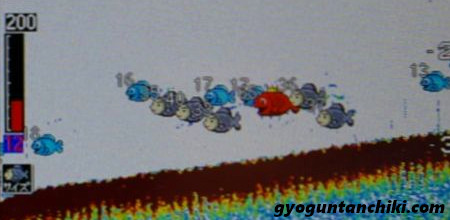
魚のイラストの頭は、常に左を向いています。いかにも左に向かって泳いでいるかのように見えます。
でも、これは定型の表示方法であり、魚の移動方向を示すものではありません。
また、フィッシュマークが表示されたとしても、必ずしも魚群であるとは限りません。
ソナー周波数を使い分ける
2周波以上の複数の周波数のソナー(超音波)を発信出来る魚探の場合、それらを上手に使い分けて探るのは、魚探機能の初歩的かつ基本的な使い方のポイントだと言えます。
2周波の場合、低周波と高周波の組み合わせが一般的です。
代表的なものは、(低)50KHzと(高)200KHzのセットです。いずれもシャワー状に発信されます。
(低)50KHz
遠くまで、裾広がりに広い範囲を探知します。
(高)200KHz
近距離向け。狭い範囲で高い分析力を発揮します。
高周波と低周波を併用すると、魚影(らしきもの)や、底質の見え方が違うことに気付きます。
(高)200KHzは、探知範囲が狭い特徴があります。画像の鮮明さや細やかさは、50KHzより良好です。
(低)50KHzは、広い範囲の探知に能力を発揮します。ボート下の周囲を広く探りますが比較的反応が弱く、なんとなくボワーッと見える時があります。
オーソドックスな使い方の流れは、次の通りとなります。
- 50KHzでおおよその状況を把握する。
- 魚影(らしきもの)、気になるエリアを見つけたら・・・
- そのエリアへ向けて200KHzを発射。でさらに詳しい状況を探る。
- 魚影(らしきもの)へ向けて釣り仕掛けを投入。
ソナー周波数による見え方の違いを知っておく
上記で低周波と高周波は、その性質が異なることをご紹介しましたが、
この事により、同じ探査ポイントでも、周波数により見え方(描画)が異なります。
見え方の違いを知っておくと、より効果的に魚探を活用出来るでしょう。
低周波(50KHz)と高周波(200KHz)の魚探画像の例です。
ボート速度は1.2knとゆっくりめ、水深は10.6mと割と浅瀬。海底は平たんです。
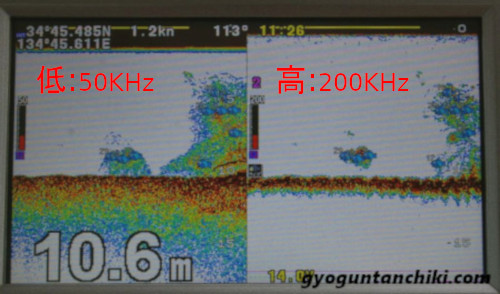
高周波:魚群や地盤等の輪郭が、比較的ぼやけず描画されています。
低周波:より雲のようにモヤっとしています。海底面のグラデーションが厚く描画されているのは、尾引きという現象です。
尾引きは、低周波に顕著に発生します。
要因は、高周波よりも指向角度が広く反射波をより多く受け取る事や、貫通能力が高いことなどが考えられます。
尾引きが分厚い場合、固い岩盤・岩礁などである可能性が高いです。
また尾引きが薄い場合は、砂地である可能性が高いでしょう。
ボートの航行速度に注意する
魚探はソナーを発信し、対象物に反射して戻ってくるソナーで探知するのですが、この際、航行速度は重要となります。
基本的には、ボートの速度が早すぎると十分な探知はできません。
探知がスムーズに出来る自船の速度を把握しておくべきでしょう。
速度により魚探画面の描画が異なる事を、画像で確認してみましょう。
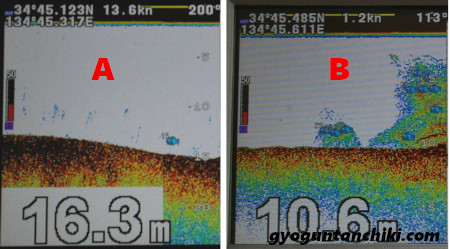
周波数50KHz、A13.6kn/B1.2knの速度での魚探画像です。
速度が遅い画像Bのほうが、情報量の多い事が分かります。但しより多くのソナーの反射を受け取るので、魚群が大きく映る傾向があります。
(なお探査ポイントは若干ズレています。)
ボートごとに魚探画面の「見え方」が異なる場合がある
魚探機器のスペック(性能)によって、描画状態は異なります。
また、振動子の取付位置などによっても、描画状態は変化します。
つまり、同じ機種を使用していたとしても、「AさんのボートとBさんのボートでは見え方が異なる」可能性があります。
自船における環境・条件ごとの画面の見え方を研究するのも良いかと思います。
ボートの前進・停止時に探知を行う
通常、魚群探知機による探査作業は、ボートが前進している時もしくは停止している時に行います。
船を後進させた場合、波やモーターのプロペラが発生させる気泡で、魚探が機能しなくなる事が多いからです。
原因は、気泡が超音波の進行の妨げとなる為です。泡切れと呼ばれる現象が起きます。
もし、後進時に魚探が満足に機能しなかったとしても、おそらく故障・トラブルではありません。心配は無用です。
泡が消えると再び画面は正常に戻ります。改めて前進しながら(もしくは停止して)探知を行いましょう。
周囲の船の影響で、正常に映らないことがある
狭いエリア内にボートや釣り船が多く集まっている状況においては、少々困った現象が起こるケースがあります。
このごろは、どの船も必ずと言っていいほど魚群探知機を搭載していて、それぞれがソナーを発信しているので、機器同士の干渉が発生して、画面にノイズが出る時が多々あるのです。
さらには、魚群探知機のパワーも関係することがあります。3kw,5kw,さらにそれ以上というような、場違いな出力の大きな魚探を備えている船が周囲にある場合、その影響で、周囲のボートの魚探画面が何も見えなくなる時すらあります。